Бурдаков, Сергей Федорович. Модели механики в задаче управления силовым взаимодействием робота с поверхностью неопределенного профиля = Mechanics models in the control problem of the force interaction between a robot and a free-formed surface [Электронный ресурс] / С. Ф. Бурдаков, О. Б. Шагниев. — Электрон. текстовые дан. (1 файл : 784 Кб) // Научно-технические ведомости Санкт-Петербургского государственного политехнического университета. Сер.: Информатика. Телекоммуникации. Управление = St. Petersburg state polytechnical university journal. Computer science. Telecommunications and control systems: научное издание. – Санкт-Петербург. – 2015. – Загл. с титул. экрана. — Электронная версия печатной публикации. — Свободный доступ из сети Интернет (чтение, печать, копирование). — Текстовый файл. — Adobe Acrobat Reader 7.0. — <URL:http://elib.spbstu.ru/dl/2/8701.pdf>. — <URL:http://doi.org/10.5862/JCSTCS.224.7>.
|
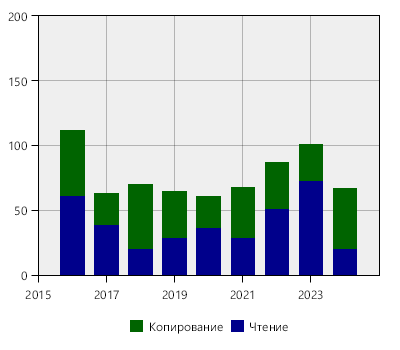
Период
|
Чтение
|
Печать
|
Копирование
|
Открытие
|
Итого
|
|
Год 2016
|
61
|
0
|
51
|
0
|
112
|
|
Год 2017
|
39
|
0
|
24
|
0
|
63
|
|
Год 2018
|
20
|
0
|
50
|
0
|
70
|
|
Год 2019
|
29
|
0
|
36
|
0
|
65
|
|
Год 2020
|
36
|
0
|
25
|
0
|
61
|
|
Год 2021
|
29
|
0
|
39
|
0
|
68
|
|
Год 2022
|
51
|
0
|
36
|
0
|
87
|
|
Год 2023
|
73
|
0
|
28
|
0
|
101
|
|
Год 2024
|
4
|
0
|
19
|
0
|
23
|
|
Всего
|
342
|
0
|
308
|
0
|
650
|
