Никитин, Александр Евгеньевич. Уменьшение погрешности построения SLAM-карты при движении робота по неровной поверхности: выпускная квалификационная работа магистра: направление 09.04.01 «Информатика и вычислительная техника» ; образовательная программа 09.04.01_20 «Проектирование компьютерных систем» = Reducing the SLAM-map error when the robot moves on an uneven surface / А. Е. Никитин; Санкт-Петербургский политехнический университет Петра Великого, Институт компьютерных наук и технологий ; научный руководитель А. А. Лавров ; консультант по нормоконтролю А. Г. Новопашенный. — Санкт-Петербург, 2020. — 1 файл (7,2 Мб). — Загл. с титул. экрана. — Доступ по паролю из сети Интернет (чтение, печать, копирование). — Adobe Acrobat Reader 7.0. — <URL:http://elib.spbstu.ru/dl/3/2020/vr/vr20-784.pdf>. — <URL:http://elib.spbstu.ru/dl/3/2020/vr/rev/vr20-784-z.zip>. — <URL:http://elib.spbstu.ru/dl/3/2020/vr/rev/vr20-784-o.pdf>. — <URL:http://elib.spbstu.ru/dl/3/2020/vr/rev/vr20-784-r.pdf>. — <URL:http://elib.spbstu.ru/dl/3/2020/vr/rev/vr20-784-a.pdf>. — DOI 10.18720/SPBPU/3/2020/vr/vr20-784. — Текст
|
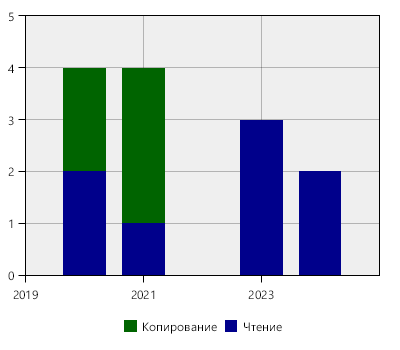
Период
|
Чтение
|
Печать
|
Копирование
|
Открытие
|
Итого
|
|
Год 2020
|
2
|
0
|
2
|
0
|
4
|
|
Год 2021
|
1
|
0
|
3
|
0
|
4
|
|
2022
|
0
|
0
|
0
|
0
|
0
|
|
Год 2023
|
3
|
0
|
0
|
0
|
3
|
|
Год 2024
|
2
|
0
|
0
|
0
|
2
|
|
Всего
|
8
|
0
|
5
|
0
|
13
|
