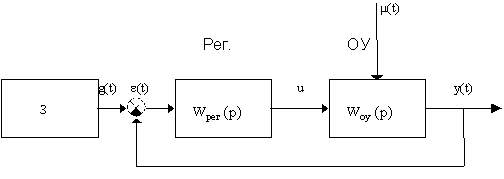
и реализующий следующий закон управления

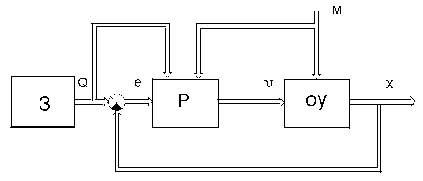
В сложных многоконтурных системах осуществляется обратная
связь по нескольким составляющим вектора состояния объекта управле-ния
Х, а также могут задаваться воздействия по составляющим вектора входного
воздействия Q и вектора возмущения M (см. рис. 1.1,б).
a)
b)
В электромеханических САУ наиболее часто применяется особый тип многоконтурных систем - системы подчиненного управления, в которых один контур вложен в другой.
На рис. 1.2 показана типичная схема трехконтурной следящей системы с форсировкой по скорости задающего воздействия uЗ. Такую структуру имеет большинство следящих приводов систем числового программного управления.
Система имеет задатчик, указывающий угол поворота (перемещения) исполнительного
органа и его скорость, а также три регулятора: регулятор положения (РП),
регулятор скорости (РС) и регулятор тока (РТ). Система построена так, что
каждый регулятор является задатчиком для последующего - регулятор положения
для регулятора скорости, а регулятор скорости - для регулятора тока (реализация
подчиненного управления). Регулятор тока через силовой вентильный преобразователь
(транзисторный или тиристорный) управляет исполнительным двигателем (ИД).
Для получения сигналов обратной связи используются датчик тока (ДТ), датчик
частоты вращения - тахогенератор (ТГ) и датчик положения (ДП), в качестве
которого чаще всего применяются фотоимпульсные датчики и СКВТ (синусно-косинусный
вращающийся трансформатор). Микропроцессорный модуль в такой системе может
выполнять функции либо только задатчика (автономный привод), либо также
и функции одного или нескольких регуляторов (неавтономный привод).
На рис. 1.2,б приведена структурная схема привода подачи системы ЧПУ, в котором МПС выполняет функции задатчика и регулятора положения. Обычно, как и показано на этой схеме, регулятор положения реализует пропорциональный закон управления с коэффициентом пропорциональности K п и форсировкой по скорости с коэффициентом Kc, а регуляторы скорости и тока являются ПИ-регуляторами. В теории автоматического управления изложены методики, следуя которым можно оптималь-ным образом выбрать параметры регуляторов, зная параметры объекта управления и требования к качеству переходных процессов и точности системы в установившихся режимах (в частности,K w - добротности системы по скорости и допустимой динамической ошибки слежения e сл.дин при максимальной скорости слежения).
Одной из особенностей микропроцессорных систем управления является наличие в них квантования по времени с периодом Т, что на схеме рис. 1.2,б представлено наличием импульсных элементов (ИЭ) и цифрово-го задатчика, задающего угол поворота Dj з за каждый квант времени Т. Выбор периода квантования зависит от требований к динамическим свой-ствам системы управления и быстродействия вычислительной части микропроцессорной системы. Обычно в электромеханических системах период Т составляет единицы миллисекунд (1-5 мс), что предъявляет достаточно высокие требования к производительности управляющих ЭВМ.
В электромеханических системах управления широкое применение находят одноплатные и однокристальные микроконтроллеры, в частности, выпускаемые фирмой INTEL контроллеры семейства МК-51 и микроЭВМ i8ХС196МС, имеющие развитую периферию, пригодную для управления электромеханикой.
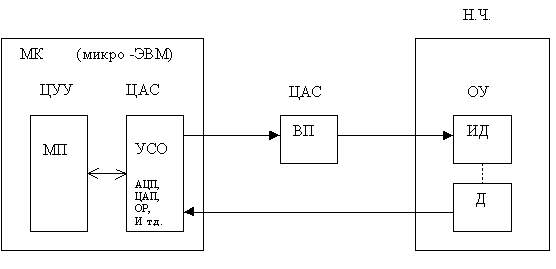
На рис. 1.3 показана укрупненная функциональная схема электромеханической системы управления с микроконтроллером. В ней можно выделить три части: микроконтроллер, состоящий из микропроцессора и ус-ройства сопряжения с объектом управления (УСО), силовой вентильный преобразователь и объект управления, включающий в себя исполнительный двигатель и датчики обратной связи.
С точки зрения исследования динамических свойств, систему можно разделить на две основные части - цифровую часть (цифровое управляющее устройство - ЦУУ) и непрерывную часть - объект управления, между которыми находится цифро-аналоговая система (ЦАС), содержащая в том или ином виде аналого-цифровые и цифро-аналоговые преобразователи (АЦП и ЦАП) [1].
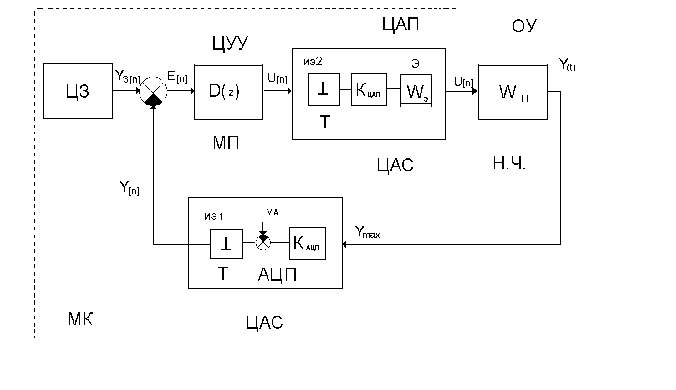
Обычно система является многоконтурной, и структура одного кон-тура (выходного) может быть представлена в виде, показанном на рис. 1.4. Система содержит в микроконтроллерной части цифровой задатчик (ЦЗ), каждый такт подающий в систему код задания YЗ[n], ЦУУ, реализующее алгоритм управления, и имеющее дискретную передаточную функцию D(z), а также АЦП и ЦАП, коэффициенты передачи KАЦП и K ЦАП которых зависят от количества разрядов (т.е. от величины одной дискреты -d ЦАП,d АЦП ). Так