
4.1. Цифровые регуляторы.
4.2. Алгоритмы цифровых регуляторов.
4.3. Синтез цифровых регуляторов.
4.4. Алгоритмы пультовых операций и общая
организация программного обеспечения.
Как известно, наиболее важным функциональным
узлом систем автоматического управления являются регуляторы, которые реализуются
в микропроцессорной САУ программным путем и являются (из-за наличия в системе
квантования по времени и уровню) цифровыми регуляторами.
Ограничиваясь рассмотрением линейных регуляторов,
приведем классификацию цифровых регуляторов из [5].
Как видно из рис. 4.1, регуляторы разделяют
на две группы: параметрически оптимизируемые и структурно оптимизируемые.
К параметрически оптимизируемым регуляторам
относятся классические виды регуляторов типа П-регулятор, ПИ-регулятор,
ПИД-регулятор и их модификации. К структурно оптимизируемым - компенсационные
регуляторы и регуляторы состояния.
Компенсационные регуляторы
проектируются с таким расчетом, чтобы снизить влияние некоторых параметров
объекта на качество управления. При этом различают следующие модификации
регуляторов этого типа:
- компенсатор - ликвидирует воздействие объекта
в особых точках передаточной функции (нули и полюса);
- апериодический регулятор - обеспечивает окончание
переходного процесса при ступенчатом возмущении за заданное время;
- регулятор-предиктор - регулятор с предсказанием
реакции; модель объекта включается в обратную связь регулятора;
- регулятор с минимальной дисперсией - применяется
в стохастических системах; минимизирует дисперсию значений регулируемой
переменной.
Рассмотренные выше регуляторы называют регуляторами "входа-выхода",
так как они контролируют входную и выходную величины и вырабатывают управляющее
воздействие согласно определенному закону управления.
В отличие от этих регуляторов, регуляторы состояния контролируют характеристики
вектора состояния объекта управления, описанного уравнениями в пространстве
состояний. При наличии полной информации о векторе состояния применяется
модальный регулятор в совокупности с модальным анализатором на входе и
модальным синтезатором на выходе для синтеза реального вектора управления.
Если некоторые переменные состояния невозможно измерить, используются регуляторы
с наблюдате-
лями, восстанавливающими переменные состояния
объекта.
В данном пособии мы ограничимся рассмотрением
реализации в микропроцессорных системах некоторых регуляторов типа "вход-выход".
4.2. Алгоритмы цифровых регуляторов.
Наиболее распространенным регулятором,
применяемым в системах управления динамическими объектами, является ПИД-регулятор
и его модификации.
Аналоговый ПИД-регулятор имеет передаточную
функцию вида
 ,
(4-1)
,
(4-1)где КП - коэффициент передачи пропорциональной части регулятора, ТИ - постоянная времени интегрирования, ТД - постоянная времени дифференцирования.
Этой передаточной функции соответствует дифференциальное уравнение
 ,
(4-2)
,
(4-2)где ![]() - выходная величина регулятора (управление), а
- выходная величина регулятора (управление), а![]() - сигнал рассогласования.
- сигнал рассогласования.
При квантовании с малой длительностью
такта Т это уравнение можно преобразовать в разностное с помощью дискретизации,
заключающейся в замене производной разностью первого порядка, а интеграла
- соответствующей интерполяционной формулой (по методу прямоугольников,
трапеций, Симпсона и т.д.).
При использовании метода прямоугольников
получаем
 .
(4-3,а)
.
(4-3,а)При использовании метода трапеций имеем
 .
(4-3,б)
.
(4-3,б)Для программной реализации в микропроцессорной
системе более пригодны рекуррентные алгоритмы, в которых текущее значение
управляющей переменной ![]() вычисляется через предыдущее значение
вычисляется через предыдущее значение ![]() и поправочный член
и поправочный член ![]()
где, исходя из уравнений (4-3) для метода прямоугольников имеем
 ,
(4-5,a)
,
(4-5,a)а, для метода трапеций
 (4-5,б)
(4-5,б)Используя поправочный член ![]() ,
получаем рекуррентные выражения, описывающие динамику дискретного закона
управления
,
получаем рекуррентные выражения, описывающие динамику дискретного закона
управления
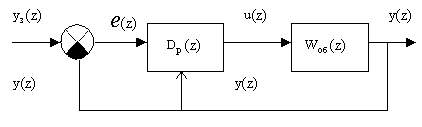
Этому разностному уравнению соответствует дискретная передаточная функция регулятора
 ,
(4-7)
,
(4-7)которая может быть получена из передаточной
функции непрерывного регулятора (4-1) приближенным представлением оператора ![]() через оператор
через оператор ![]() .
В простейшем случае при использовании метода трапеций имеем
.
В простейшем случае при использовании метода трапеций имеем
 . (4-8)
. (4-8)Согласно [5], существуют различные модификации дискретных ПИД-регуляторов.
Так, например, возможно повышение порядка регулятора за счет фильтрации сигнала рассогласования перед его дифференцированием. Этому закону управления в аналоговом регуляторе соответствует передаточная функция
 , получим
дискретную передаточную функцию регулятора более высокого порядка
, получим
дискретную передаточную функцию регулятора более высокого порядка
 ,
(4-9)
,
(4-9)
B общем виде алгоритм работы регулятора
описывается рекуррентным соотношением вида
 .
(4-11)
.
(4-11)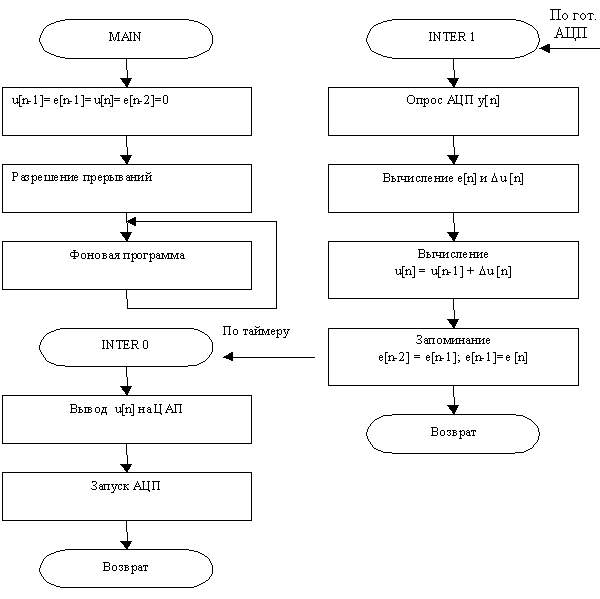
мых - интегратора и рекурсивного фильтра.
Основными модулями алгоритма являются блок программной реализации интегратора
И с ограничением и блок рекурсивного фильтра РКФ.
Как показано в [6], регулятор описывается
дискретной передаточной функцией вида
 , (4-13,а)
, (4-13,а)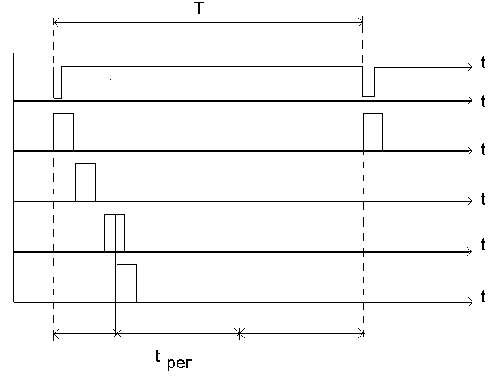
прямоугольников, NР.Ф.
- код на выходе рекурсивного фильтра.
Для ограничения кода ошибки Nе
и кода на выходе интегратора NИ
и регулятора NР
используется макрокоманда LIM.
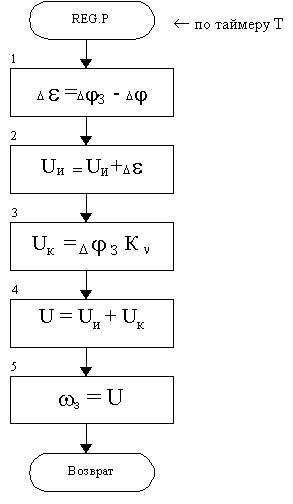
Алгоритм программной реализации работы цифрового регулятора с интегратором,
построенным по методу правых прямоугольников, показан на рис. 4.5. Передаточная
функция такого регулятора имеет вид
 .
(4-13,б)
.
(4-13,б)
где
В блоках 1 и 2 алгоритма, представленного на рис. 4.5, производится вычисление и ограничение сигнала рассогласования (ошибки) Nе. В блоках 3 и 4 вычисляется интеграл от ошибки. Программе рекурсивного фильтра соответствуют блоки 5..11, а в блоках 12 и 13 вычисляется и ограничивается значение кода на выходе регулятора NР.
4.3. Синтез цифровых регуляторов.
При достаточно малом периоде квантования
Т (не превосходящем ![]() ,
где
,
где ![]() -
наименьшая постоянная времени в системе) возможен синтез цифрового регулятора
по непрерывному прототипу.
-
наименьшая постоянная времени в системе) возможен синтез цифрового регулятора
по непрерывному прототипу.
Рассмотрим для примера одноконтурную систему регулирования частоты вращения двигателя постоянного тока, структурная схема которой представлена на рис. 4.6,а. Она состоит из регулятора частоты вращения
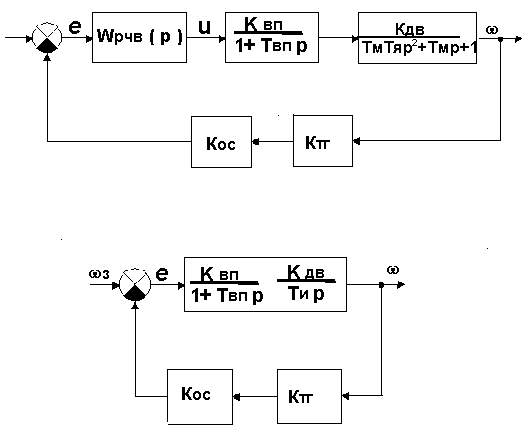
РЧВ, реализованного в микропроцессорной
системе программно, вентильного силового преобразователя ВП и двигателя
постоянного тока ДПТ, инерционность которого определяется двумя постоянными
времени ![]() и
и ![]() , причем
обычно ТМ>>ТЯ>ТВП. Примем за аналоговый
прототип РЧВ ПИД-регулятор с передаточной функцией, определяемой выражением
(4-1) и приведем ее к следующему виду
, причем
обычно ТМ>>ТЯ>ТВП. Примем за аналоговый
прототип РЧВ ПИД-регулятор с передаточной функцией, определяемой выражением
(4-1) и приведем ее к следующему виду
 .
(4-16)
.
(4-16) , (4-18)
, (4-18)Характеристический полином передаточной
функции (4-18) обычно представляется в виде Т12р2+2xТ1р+1,
где x -
коэффициент колебательности, оптимальное значение которого для таких систем ![]() (т.е. около 0.707).
(т.е. около 0.707).
С учетом этого соотношения получим
 .
(4-20)
.
(4-20)
начиная с внутреннего токового контура, как наиболее быстродействующего; оптимальным для него является ПИ-регулятор, передаточная функция которого получается из (4-1) при ТД=0. Порядок выбора оптимальных параметров и дискретизации тот же, как и при синтезе ПИД-регулятора. Наилучшим для данной системы регулятором частоты вращения (РЧВ) является П-регулятор, имеющий передаточный коэффициент К, оптимальное значение которого выбирается так же, как при синтезе ПИ-регулятора. Синтезированная система для внешнего контура показана на рис. 4.8,а, где
Если пренебречь достаточно малой постоянной времени Т0, получим идеальный следящий привод с передаточной функцией замкнутой системы
 , (4-21)
, (4-21)
коррекцию по скорости, как показано на рис. 4.8,а пунктиром. В этом случае установившаяся ошибка слежения будет определяться как
 , (4-22)
, (4-22)На рис. 4.8,б показана структурная схема одной из возможных реализаций цифрового регулятора положения с инкрементным датчиком, осуществляющего коррекцию по скорости.
Задание и сигнал обратной связи здесь представляются в виде приращений угла Djз и Dj за время квантования Т. Поэтому регулятор содержит интегральную составляющую и способен выполнять коррекцию по скорости. Реализуемый им закон управления можно представить в виде
или при дискретизации и вычислении интеграла по методу прямоугольников
 (4-23).
(4-23).Алгоритм работы цифрового регулятора по этой формуле показан на рис. 4.9.
Алгоритм работы цифрового регулятора рис. 4.9.
При больших величинах периода квантования применяются апериодические компенсационные регуляторы, синтез которых проводится по структурной схеме дискретной САР, переход к которой осуществляется дискретизацией объекта управления (объект представляется дискретной передаточной функцией DОБ(z)). Дискретная передаточная функция объекта управления может быть представлена в виде
 ,
(4-24)
,
(4-24)причем обычно n<m.
Работа обычного апериодического компенсационного регулятора ограничивается тем условием, что при ступенчатом воздействии переходный процесс должен закончится за m тактов. Тогда передаточная функция регулятора будет иметь вид
 , (4-25)
, (4-25)Приведем пример синтеза цифрового регулятора частоты вращения для системы, структурная схема которой изображена на рис. 4.6. При пренебрежении инерционностью вентильного преобразователя (ТВП=0), передаточная функция объекта управления в системе, приведенной к виду, показанному на рис. 4.10(a), будет равна
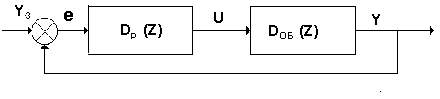
 ,
(4-28)
,
(4-28)Применив метод прямоугольников для выполнения дискретного интегрирования, получим дискретную передаточную функцию объекта
 .
.где сМ=ТМ/Т, сЯ=ТЯ/Т .
Приведем передаточную функцию к стандартному виду
 ,
(4-29)
,
(4-29)Передаточная функция апериодического регулятора будет иметь вид
 .
(4-31)
.
(4-31)Приняв К=1 и ТМ=10ТЯ, получим
|
|
|
|
|
|
|
|
|
|
|
|
Временная диаграмма работы регулятора при
единичном ступенчатом управлении показана на рис. 4.10,б. Как видно из
диаграммы, при Т=ТM/3 для того, чтобы переходный процесс
закончился за три такта, в первый такт регулятор должен воздействовать
на объект с интенсивностью, в пять раз большей, чем в установившемся режиме,
т.е. u[0]=5u[2].
Поэтому не следует выбирать слишком малые
периоды квантования. Примерная рекомендация
4.4. Алгоритмы пультовых операций и общая организация программного обеспечения.
В микропроцессорных системах обычно присутствует
пульт оператора, посредством которого можно задавать различные режимы работы
системы, вводить исходные данные, выводить определенную информацию о состоянии
объекта и т.д. Пультовые режимы МПС поддерживаются программным обеспечением,
в качестве примера которого может быть приведена встроенная операционная
система "Монитор"; ее основными составляющими являются программы опроса
пультовой клавиатуры, программы индикации, диспетчер режимов и т.п.
Рассмотрим более подробную программно-аппаратную
организацию основных пультовых операций.
Работа с клавиатурой
пульта. Можно выделить две основные фор-мы организации
опроса клавиатуры: сканирование и опрос по прерыванию. В первом случае
при необходимости определить состояние клавиатуры, основная программа передает
управление процедуре, которая последовательно или последовательно-параллельно
(группами), опрашивает состояние контактов клавиатуры; при этом каждому
контакту может соот-

Работа с устройствами
отображения информации. Для индикации на пультах микропроцессорных
систем часто используется линейка семисегментных светодиодных индикаторов,
работающих в динамическом режиме, т.е. с последовательным обслуживанием
разрядов с высокой частотой (примерно равной 1 кГц).
На рис. 4.12,а показана схема подсоединения
восьмиразрядного динамического индикатора к порту ввода-вывода, в котором
порт С через транзисторы по очереди подключает к питанию аноды семисегментных
индикаторов, выбирая соответствующий разряд, а порт А выдачей нулей подключает
катоды, задавая выводимый символ.
Инициализация программы PULT может происходить при включении источника питания, при выполнении программного сброса МПС, осуществляемого нажатием кнопки RESET, или макрокомандой операционной системы "Монитор", если таковая существует в данном варианте МПС.
Диспетчер режимов должен осуществлять переключение на выполнение различных программ в зависимости от состояния тумблеров пульта управления (ПУ), так как система может работать в различных режимах: рабочем, тестовом, наладочным и т.д. Для того, чтобы диспетчер режимов мог модифицировать и программы, работающие по прерываниям, удобно иметь программный регистр состояния системы (PCC, SSR), в котором отображается состояние переключателей ПУ и к которому могут обра-щаться все программы.
Примерный алгоритм программы диспетчера режимов приведен на рис. 4.13. Первые два блока (1 и 2) программы PULT обеспечивают начальную установку параметров - NUST - и инициализацию внешних устройств - INIT. Возможны два входа в программу: PULT.0 - с начальной установкой стандартных параметров и PULT.1 - с работой по нестандартным параметрам, которые должны быть заданы заранее до запуска программы PULT.
В блоке 3 диспетчер опрашивает переключатели ПУ, задающие различные режимы и программы работы МПС и отображает их состояние в регистре статуса системы - SSR, а затем переходит к выполнению рабочих фоновых программ. Рабочие фоновые программы и программы, работающие по прерыванию, при необходимости могут опрашивать регистр SSR для определения состояния ПУ. Часто бывает удобно иметь двойной SSR, в котором хранится и предыдущее состояние системы, так как иногда ход выполнения управляющей программы зависит от предыдущего состояния переключателей ПУ.

Для организации диалогового взаимодействия
с микропроцессорной системой с помощью пульта оператора универсальные микроконтроллеры,
такие, как, например, КПУ "Электроника МС 2702", имеют встроенную операционную
систему - "Монитор".
Диалог “КПУ - пользователь” производится
с пульта оператора. При задании на пульте очередной команды Монитора происходит
прерывание рабочей программы и переход на обработку соответствующей команды.
Пользователь обращается к Монитору с помощью
специальных команд. По окончании выполнения команды Монитора происходит
передача управления на выполнение прерванной программы. Процесс ввода команды,
а также результат ее выполнения отображаются обычно на дисплее пульта.
Команды Монитора (например, КПУ "Электроника
МС 2702") по типу выполняемой ими функции можно разделить на три группы:
- команда управления выполнением программы
- G;
- команды поддержки процесса отладки -
E, S, J, A;
- сервисные команды - F, C, D, I, O, P,
B.
Команда G (мнемоника “GO” - запустить)
является командой запуска программы с определенного адреса или с адреса
счетчика команд с возможными точками останова.
С помощью команды Е (“EMBARG” - загрузить)
производится просмотр и модификация содержимого регистров микропроцессора.
По команде S (“SUBSTITUTE” - заменить)
производится индикация и модификация содержимого памяти.
Команды J и A служат для установки и отмены
режима трассировки при отладке программ.
Команды I и О служат для обращения к внешним
устройствам (портам). Команда I (“INPUT” - ввод) производит индикацию содержимого
регистра внешнего устройства по адресу, вводимому с пульта, а команда О
(“OUTPUT” - вывод) производит вывод данных на регистр внешнего устройства.
Таким образом, Монитор представляет собой
программный модуль диалогового взаимодействия пользователя с микропроцессорной
системой.
Входными данными для Монитора являются
его команды, а выходные данные представляют собой результаты выполнения
команд, записываемые в ОЗУ или выдаваемые в виде сообщений на дисплее пульта
или на внешних устройствах.
Так как реакция Монитора зависит от последовательности
команд, задаваемой с пульта оператора, то он обычно строится как программный
конечный автомат с памятью, имеющий определенное количество состояний,
и выдающий выходные воздействия в зависимости от входных воздействий и
своего внутреннего состояния, а также переходящий в новые состояния в зависимости
от входных воздействий. Поэтому в Мониторе обычно реализуют программным
путем автомат Мили или Мура, имеющий регистр состояния и определенные функции
(матрицы) переходов и выходов. Программное обеспечение (ПО) микропроцессорной
системы управления в соответствии с выполняемыми функциями можно разделить
на три части:
- прикладное ПО - совокупность программ,
разрабатываемых целевым образом для решения тех прикладных задач, для которых
проектируется система - задач управления;
- ПО разработки программ - совокупность
программ, используемых в качестве средств САПР прикладного ПО на всех этапах
разработки программ для МПС с помощью отладочной системы;
- ПО вычислительного процесса - совокупность
программ, предназначенных для организации вычислительного процесса в МПС
и для контроля ее функционирования как при реализации прикладных задач,
и при использовании микропроцессорной
системы для разработки математического обеспечения.
Подмножество программ, предназначенных для выполнения на данной микропроцессорной системе, называют ее резидентным программным обеспечением. Прикладное ПО и ПО вычислительного процесса являются резидентным программным обеспечением и располагаются в постоянной памяти программ микроконтроллера.
ПО, предназначенное для работы с микропроцессорной системой и ее программами, но реализованное на других, программно не совместимых с ней вычислительных средствах, называют кроссовым ПО данной микропроцессорной системы. К кроссовому ПО относят всевозможные программные отладчики, эмуляторы и симуляторы.
САПР-ПО может быть резидентным, кроссовым или смешанным.
Структура программного обеспечения микропроцессорных систем управления представлена на рис. 4.14.