Моторин, Дмитрий Евгеньевич. Алгоритм разрешения коллизий при планировании движения группы роботов в условиях пространственно-ситуационной неопределённости = An Algorithm for Collision Avoidance in Path Planning for a Group of Robots in a Spatio-Situational Indeterminacy [Электронный ресурс] / Д. Е. Моторин, С. Г. Попов, Л. М. Курочкин. — Электрон. текстовые дан. (1 файл : 2,66 Мб) // Научно-технические ведомости Санкт-Петербургского государственного политехнического университета. Сер.: Информатика. Телекоммуникации. Управление = St. Petersburg state polytechnical university journal. Computer science. Telecommunications and control systems: научное издание. – Санкт-Петербург. – 2017. – Список литературы представлен на англ. и рус. яз. — Загл. с титул. экрана. — Электронная версия печатной публикации. — Свободный доступ из сети Интернет (чтение, печать, копирование). — Текстовый файл. — Adobe Acrobat Reader 7.0. — <URL:http://elib.spbstu.ru/dl/2/j17-416.pdf>. — <URL:http://doi.org/10.18721/JCSTCS.10203>.
|
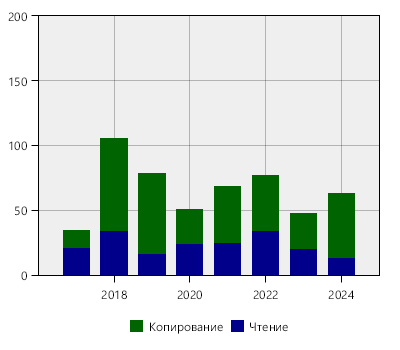
Период
|
Чтение
|
Печать
|
Копирование
|
Открытие
|
Итого
|
|
Год 2017
|
21
|
0
|
14
|
0
|
35
|
|
Год 2018
|
34
|
0
|
72
|
0
|
106
|
|
Год 2019
|
16
|
0
|
63
|
0
|
79
|
|
Год 2020
|
24
|
0
|
27
|
0
|
51
|
|
Год 2021
|
25
|
0
|
44
|
0
|
69
|
|
Год 2022
|
34
|
0
|
43
|
0
|
77
|
|
Год 2023
|
20
|
0
|
28
|
0
|
48
|
|
Год 2024
|
2
|
0
|
30
|
0
|
32
|
|
Всего
|
176
|
0
|
321
|
0
|
497
|
