Daeef, F. Application of the computer vision system for controlling a mobile robot in a dynamic environment = Применение системы технического зрения при управлении мобильным роботом в динамической среде / F. Daeef. — 1 файл (544 Кб). — DOI 10.18721/JCSTCS.13102. — Текст: электронный // Информатика, телекоммуникации и управление = Computing, Telecommunications and Control. – 2020. – С. 19-30. — Свободный доступ из сети Интернет (чтение, печать, копирование). — <URL:http://elib.spbstu.ru/dl/2/j20-128.pdf>.
|
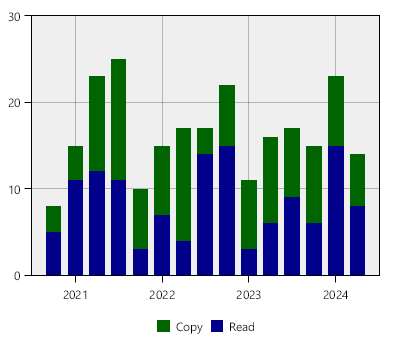
Period
|
Read
|
Print
|
Copy
|
Open
|
Total
|
|
Year 2020
|
Quarter 4
|
5
|
0
|
3
|
0
|
8
|
|
Year 2021
|
Quarter 1
|
11
|
0
|
4
|
0
|
15
|
|
Quarter 2
|
12
|
0
|
11
|
0
|
23
|
|
Quarter 3
|
11
|
0
|
14
|
0
|
25
|
|
Quarter 4
|
3
|
0
|
7
|
0
|
10
|
|
Year 2022
|
Quarter 1
|
7
|
0
|
8
|
0
|
15
|
|
Quarter 2
|
4
|
0
|
13
|
0
|
17
|
|
Quarter 3
|
14
|
0
|
3
|
0
|
17
|
|
Quarter 4
|
15
|
0
|
7
|
0
|
22
|
|
Year 2023
|
Quarter 1
|
3
|
0
|
8
|
0
|
11
|
|
Quarter 2
|
6
|
0
|
10
|
0
|
16
|
|
Quarter 3
|
9
|
0
|
8
|
0
|
17
|
|
Quarter 4
|
6
|
0
|
9
|
0
|
15
|
|
Year 2024
|
Quarter 1
|
15
|
0
|
8
|
0
|
23
|
|
Quarter 2
|
6
|
0
|
5
|
0
|
11
|
|
Total
|
127
|
0
|
118
|
0
|
245
|
