Тэн Гэнчэнь. Проектирование, моделирование и управление исполнительными элементами робота-манипулятора с пневмо-приводом: выпускная квалификационная работа магистра: направление 09.04.01 «Информатика и вычислительная техника» ; образовательная программа 09.04.01_17 «Интеллектуальные системы (международная образовательная программа)» = Soft pneumatic actuator of robot-manipulator: design, simulation and control / Тэн Гэнчэнь; Санкт-Петербургский политехнический университет Петра Великого, Институт компьютерных наук и технологий; научный руководитель В. П. Шкодырев; консультант по нормоконтролю Е. Н. Селиванова. — Санкт-Петербург, 2020. — 1 файл (7,1 Мб). — Загл. с титул. экрана. — Доступ по паролю из сети Интернет (чтение, печать, копирование). — Adobe Acrobat Reader 7.0. — <URL:http://elib.spbstu.ru/dl/3/2020/vr/vr20-5599.pdf>. — <URL:http://elib.spbstu.ru/dl/3/2020/vr/rev/vr20-5599-o.pdf>. — <URL:http://elib.spbstu.ru/dl/3/2020/vr/rev/vr20-5599-r.pdf>. — <URL:http://elib.spbstu.ru/dl/3/2020/vr/rev/vr20-5599-a.pdf>. — DOI 10.18720/SPBPU/3/2020/vr/vr20-5599. — Текст
|
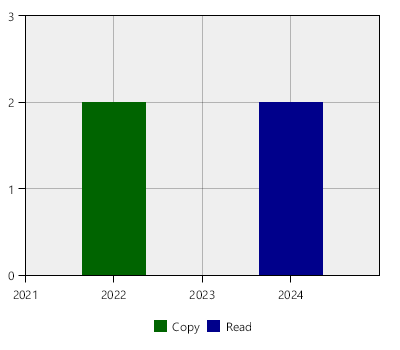
Period
|
Read
|
Print
|
Copy
|
Open
|
Total
|
|
Year 2022
|
0
|
0
|
2
|
0
|
2
|
|
Total
|
0
|
0
|
2
|
0
|
2
|
