Ростов, Николай Васильевич. Анализ алгоритмов решения обратных задач кинематики в системах управления движением роботов [Электронный ресурс] = Algorithm analysis for solving the inverse kinematic problems in robot motion control systems / Н.В. Ростов. — (Системный анализ и управление). — Электрон. текстовые дан. (1 файл : 247 Кб) // Научно-технические ведомости Санкт-Петербургского государственного политехнического университета. Сер.: Информатика. Телекоммуникации. Управление = St. Petersburg state polytechnical university journal. Computer science. Telecommunications and control systems: научное издание. – Санкт-Петербург. – 2014. – Загл. с титул. экрана. — Электронная версия печатной публикации. — Свободный доступ из сети Интернет (чтение, печать, копирование). — Текстовый файл. — Adobe Acrobat Reader 7.0. — <URL:http://elib.spbstu.ru/dl/2/5036.pdf>.
|
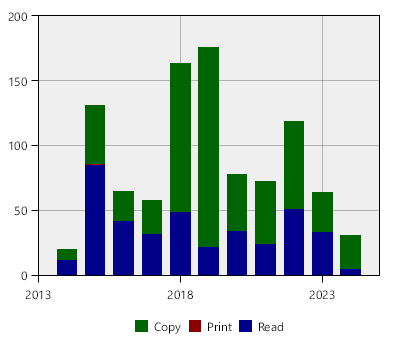
Period
|
Read
|
Print
|
Copy
|
Open
|
Total
|
|
Year 2014
|
12
|
0
|
8
|
0
|
20
|
|
Year 2015
|
85
|
1
|
45
|
0
|
131
|
|
Year 2016
|
42
|
0
|
23
|
0
|
65
|
|
Year 2017
|
32
|
0
|
26
|
0
|
58
|
|
Year 2018
|
49
|
0
|
115
|
0
|
164
|
|
Year 2019
|
22
|
0
|
154
|
0
|
176
|
|
Year 2020
|
34
|
0
|
44
|
0
|
78
|
|
Year 2021
|
24
|
0
|
49
|
0
|
73
|
|
Year 2022
|
51
|
0
|
68
|
0
|
119
|
|
Year 2023
|
33
|
0
|
31
|
0
|
64
|
|
Year 2024
|
5
|
0
|
29
|
0
|
34
|
|
Total
|
389
|
1
|
592
|
0
|
982
|
